ROS Basics in 5 days (C++) 4.4 Topics Quiz Not subscribed to
Por um escritor misterioso
Last updated 23 abril 2025
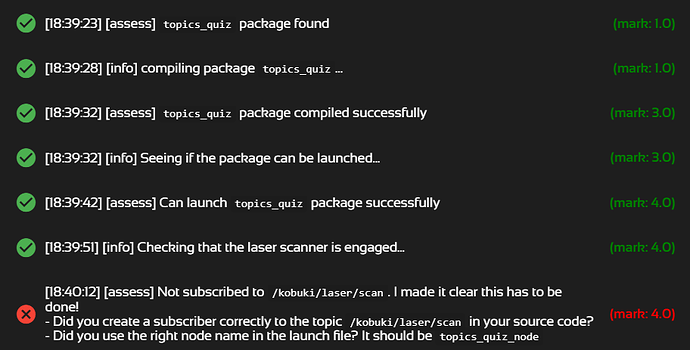
I don’t understand what I am doing wrong. The robot avoids an obstacle. The node name is correct (“topics_quiz_node”). No other programs are running. #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <sensor_msgs/LaserScan.h> float angVel = 0; void laserCallback(const sensor_msgs::LaserScan::ConstPtr& laserScan) { angVel = 0.0; ROS_INFO("Forward: %f", laserScan->ranges[360]); ROS_INFO("Left: %f", laserScan->ranges[719]); ROS_INFO("Right: %f", laserScan->ranges[719]);
ROS Basics in 5 days (C++) 4.4 Topics Quiz Not subscribed to /kobuki/laser/scan - ROS Basics In 5 Days (C++) - The Construct ROS Community
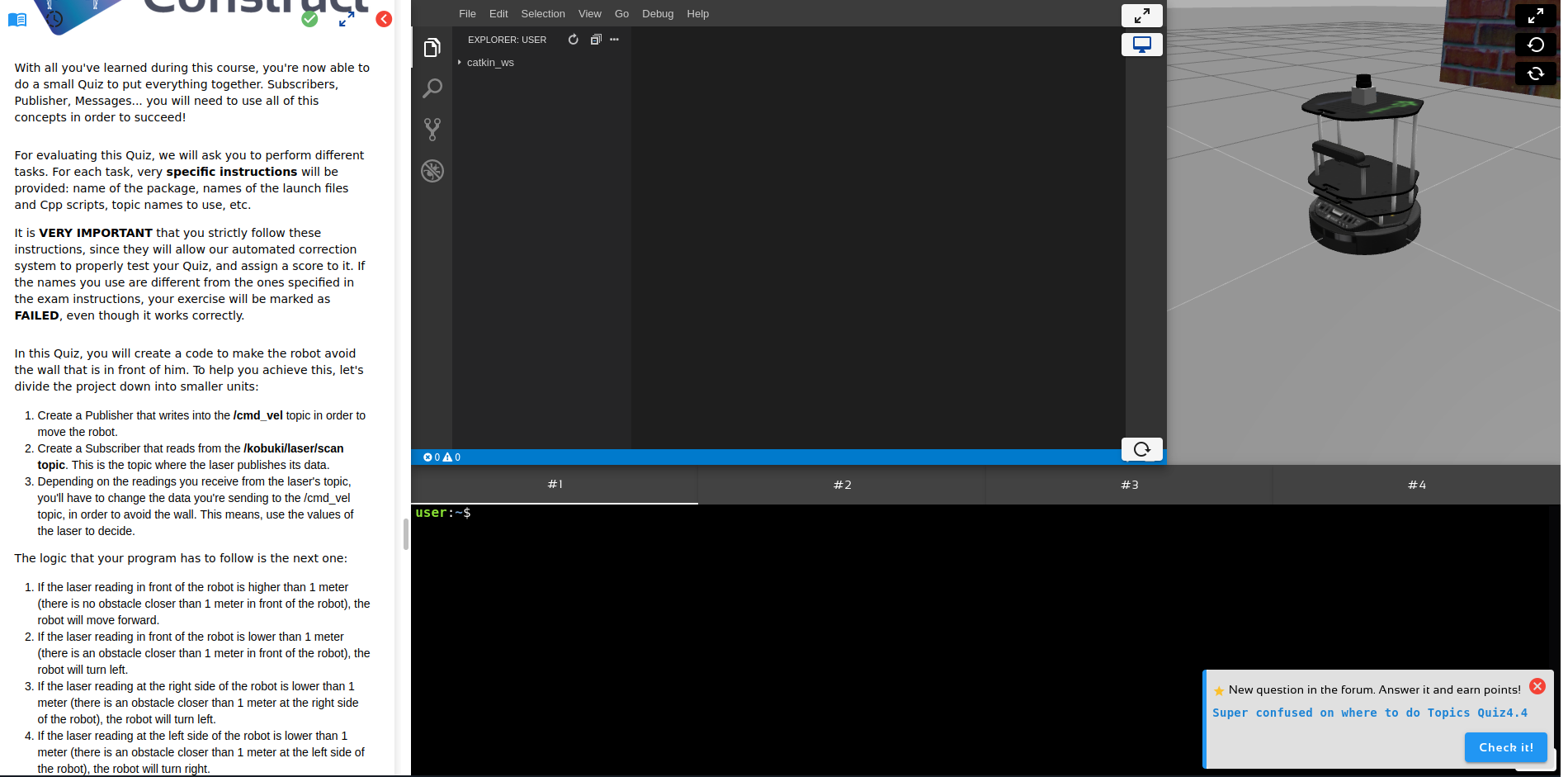
Super confused on where to do Topics Quiz4.4 - ROS Basics In 5 Days (C++) - The Construct ROS Community

American Society for Clinical Pharmacology and Therapeutics - 2020 - Clinical Pharmacology & Therapeutics - Wiley Online Library

Using LCD Displays with Arduino
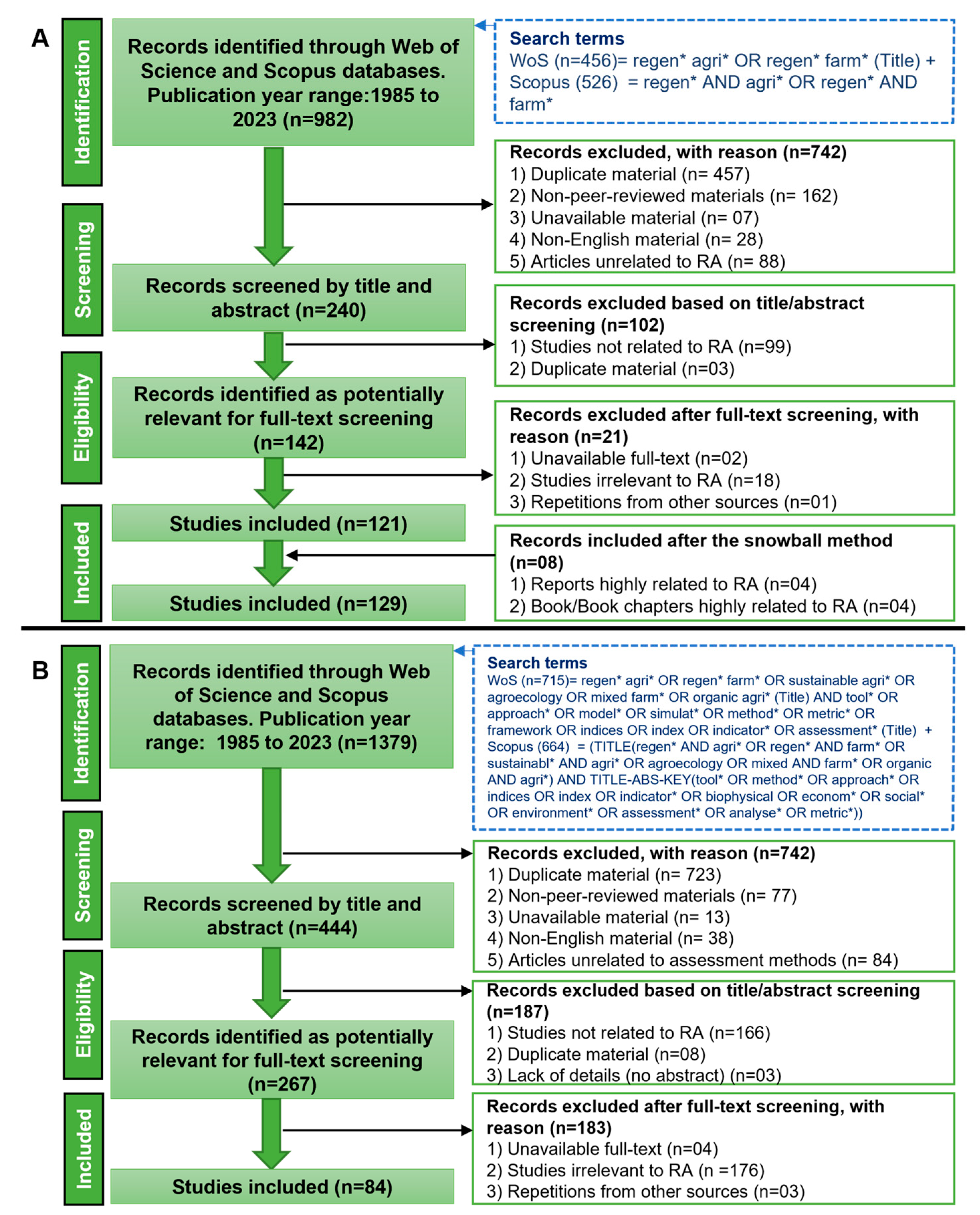
Sustainability, Free Full-Text

ROS Q&A] 189 - How to create a custom message for ROS Actions

ROS Ignite Academy][ROS for Beginners] ROS Basics in 5 Days #ROS - Qiita
Client Resources

OMNeT++ - Simulation Manual

Fast RTPS: Programming with the Default Middleware for Robotics Adopted in ROS2
Recomendado para você
-
 NCS SCAN10XA OpScan 3 OMR Optical Mark Reader Scanner23 abril 2025
NCS SCAN10XA OpScan 3 OMR Optical Mark Reader Scanner23 abril 2025 -
 Fujitsu ScanSnap iX1500 Color Duplex Document Scanner with Touch Screen for Mac or PC, White (2018 Release)23 abril 2025
Fujitsu ScanSnap iX1500 Color Duplex Document Scanner with Touch Screen for Mac or PC, White (2018 Release)23 abril 2025 -
 Upper Merion Area School District on X: We are looking for23 abril 2025
Upper Merion Area School District on X: We are looking for23 abril 2025 -
 Can you use an intraoral scanner for upper jaw impressions23 abril 2025
Can you use an intraoral scanner for upper jaw impressions23 abril 2025 -
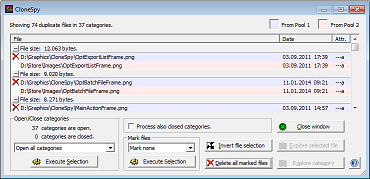 The All duplicates window - CloneSpy Documentation23 abril 2025
The All duplicates window - CloneSpy Documentation23 abril 2025 -
Omaha Scanner - Douglas County Health Department announce one new23 abril 2025
-
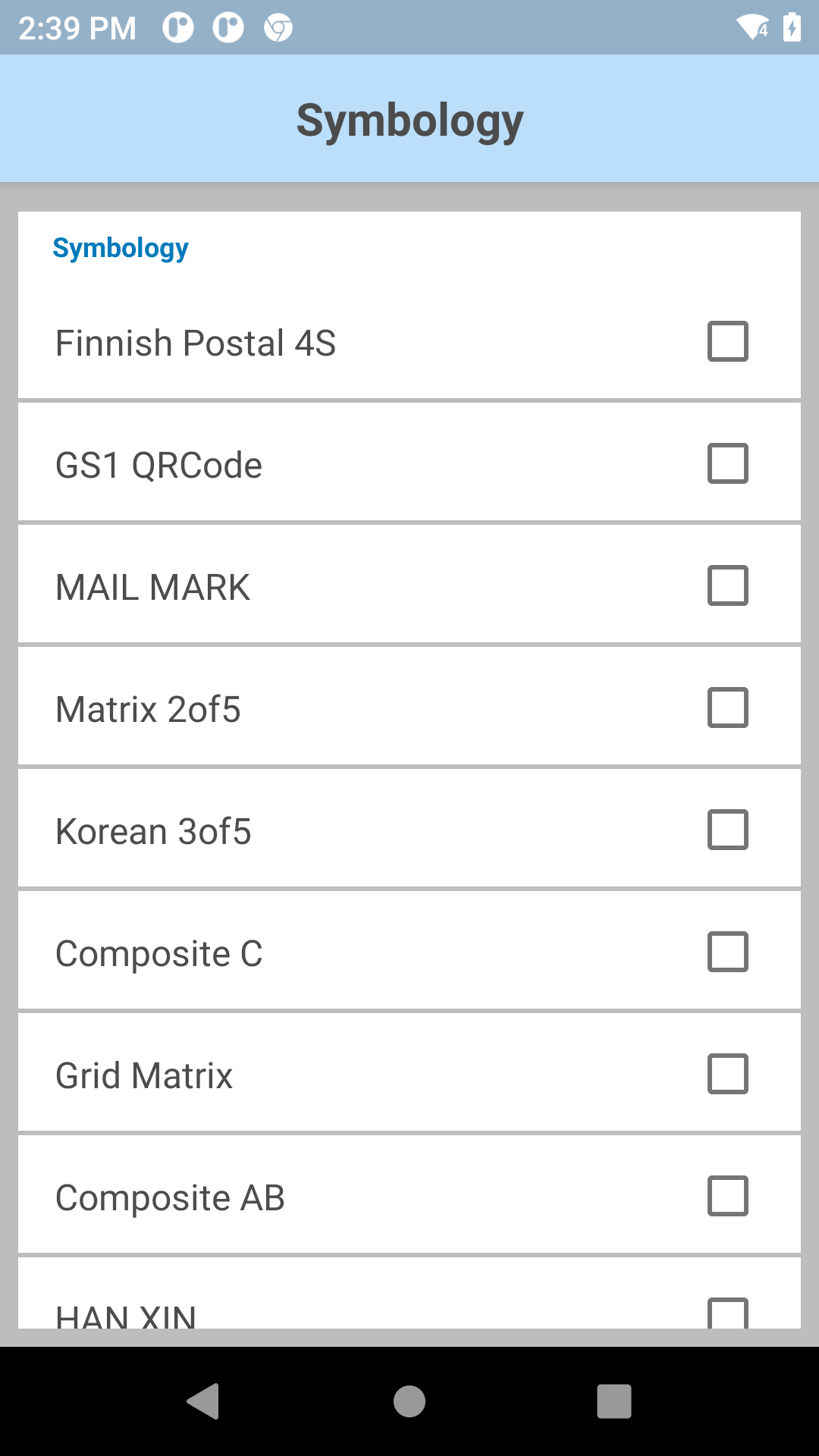 Barcode Input - Zebra Technologies TechDocs23 abril 2025
Barcode Input - Zebra Technologies TechDocs23 abril 2025 -
 Multiscanner - Outros itens para comércio e escritório - Siqueira23 abril 2025
Multiscanner - Outros itens para comércio e escritório - Siqueira23 abril 2025 -
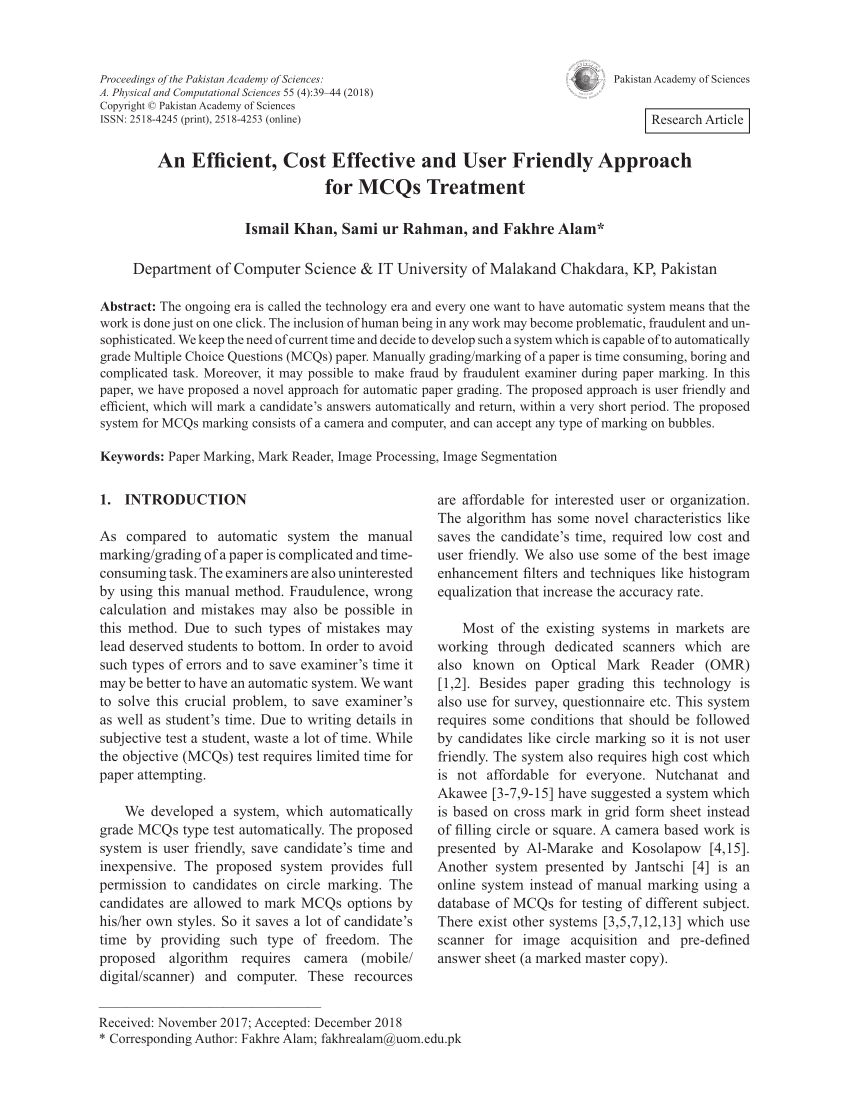 PDF) An Efficient, Cost Effective and User Friendly Approach for23 abril 2025
PDF) An Efficient, Cost Effective and User Friendly Approach for23 abril 2025 -
 NADAMOO Wireless Barcode Scanner 328 Feet23 abril 2025
NADAMOO Wireless Barcode Scanner 328 Feet23 abril 2025

você pode gostar
-
 Call of the Night (TV Series 2022) - Awards - IMDb23 abril 2025
Call of the Night (TV Series 2022) - Awards - IMDb23 abril 2025 -
 miniaturabarbieartesanatoemaispecuniamilliomcroche: Roupas de Crochê Para Barbie Com Gráfico - Por Pecunia MillioM23 abril 2025
miniaturabarbieartesanatoemaispecuniamilliomcroche: Roupas de Crochê Para Barbie Com Gráfico - Por Pecunia MillioM23 abril 2025 -
Devil May Cry / Memes - TV Tropes23 abril 2025
-
 Memes de imagem rD7IlzH18 por meiacheetos_2017: 58 comentários - iFunny Brazil23 abril 2025
Memes de imagem rD7IlzH18 por meiacheetos_2017: 58 comentários - iFunny Brazil23 abril 2025 -
 Hot Wheels Monster Trucks Car Chompin' Mega Wrex Vehicle, for Ages23 abril 2025
Hot Wheels Monster Trucks Car Chompin' Mega Wrex Vehicle, for Ages23 abril 2025 -
 Sailor Moon Crystal: Season 2, Episode 2 - Rotten Tomatoes23 abril 2025
Sailor Moon Crystal: Season 2, Episode 2 - Rotten Tomatoes23 abril 2025 -
 The Making of The Rat King THE LAST OF US PART 223 abril 2025
The Making of The Rat King THE LAST OF US PART 223 abril 2025 -
 Channel 4 Location, Location Phil Spencer and Kirstie Allsopp's23 abril 2025
Channel 4 Location, Location Phil Spencer and Kirstie Allsopp's23 abril 2025 -
 Cult of the Lamb Game 4K Wallpaper iPhone HD Phone #341i23 abril 2025
Cult of the Lamb Game 4K Wallpaper iPhone HD Phone #341i23 abril 2025 -
Calça Legging Meia Cinta Romance Feminina Suplex Basica Cintura23 abril 2025