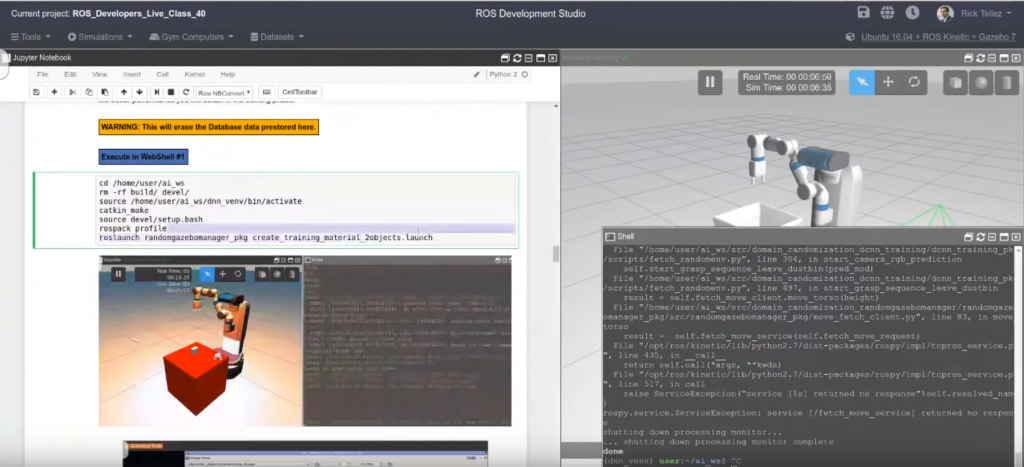
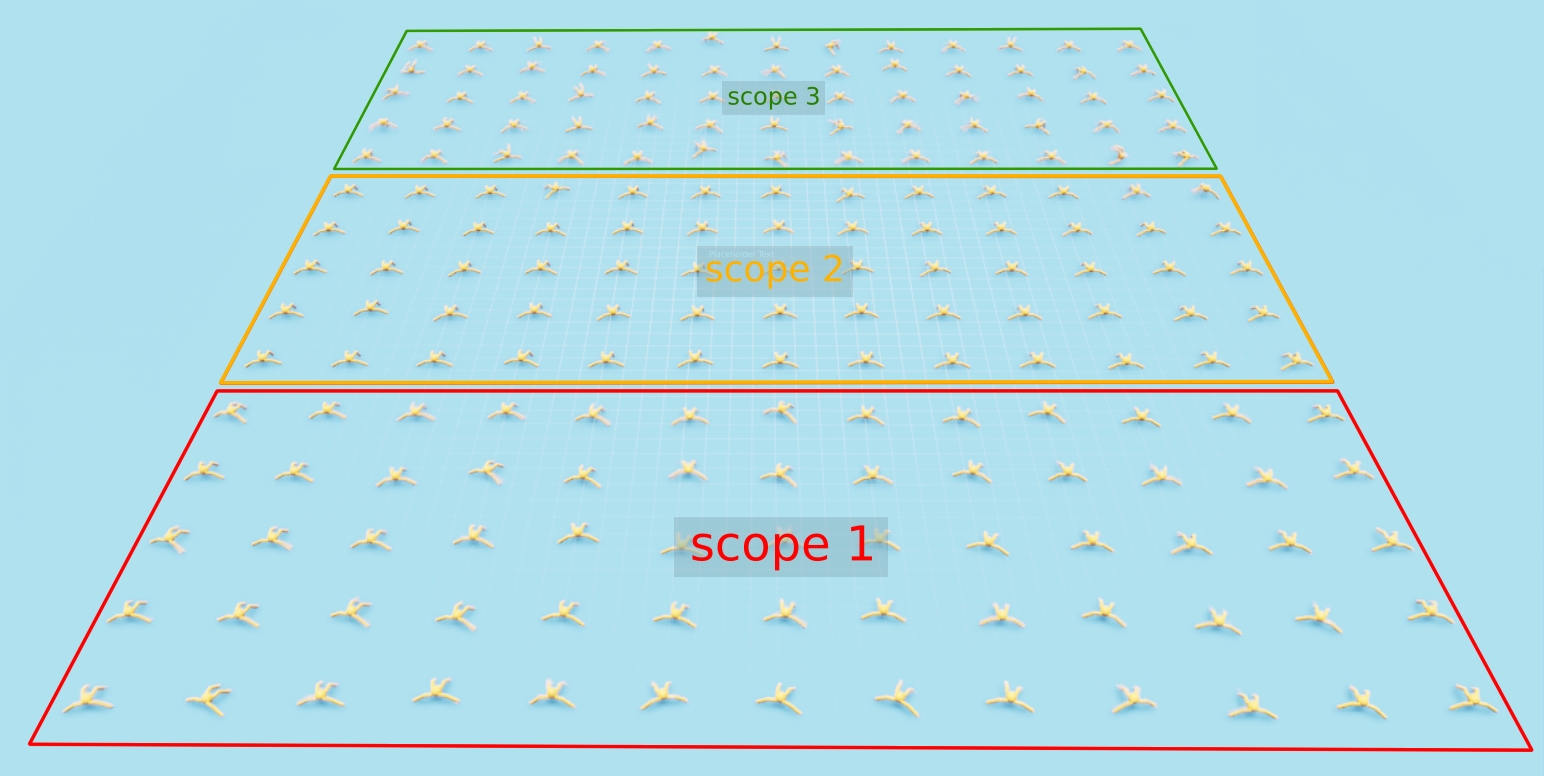
Example of a parallel learning configuration in an Isaac Sim
Por um escritor misterioso
Last updated 10 abril 2025

Build Connected Robots with NVIDIA Isaac and ROS2 - Latest Open Tech From Seeed

Full article: Flexible memristor based neuromorphic system for implementing multi-layer neural network algorithms

PDF] Robust Sim2Real Transfer by Learning Inverse Dynamics of Simulated Systems

Stem Cell-Derived Extracellular Vesicles for Cancer Therapy and Tissue Engineering Applications

Example of a parallel learning configuration in an Isaac Sim

NVIDIA Isaac SIM Latest Release Update with Gazebo bridge and new features - General - ROS Discourse

myCobot Gripping Task: Reinforcement Learning with Isaac Gym

Education and Practice – The Field

NVIDIA Releases Isaac Sim 2022.1 to Bridge the Simulation to Reality Gap for Robotics Developers - Robotics 24/7
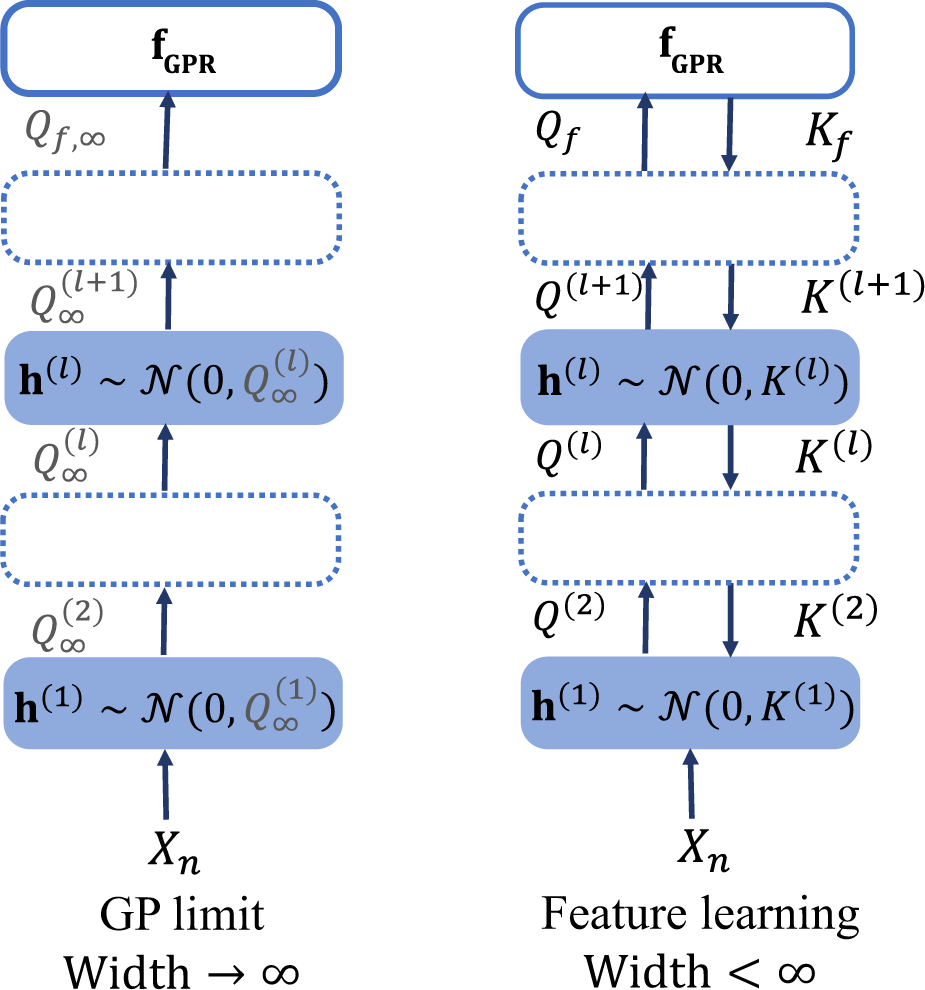
Separation of scales and a thermodynamic description of feature learning in some CNNs
Robotics development gets faster with ROS, the cloud

The Ultimate Flask Front-End – Part 2 – Real Python
Examples - skrl (1.0.0)
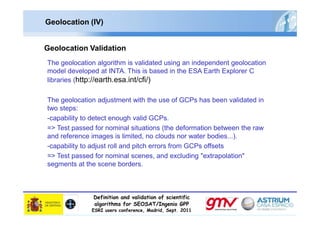
Definition and Validation of Scientific Algorithms for the SEOSAT/Ingenio GPP
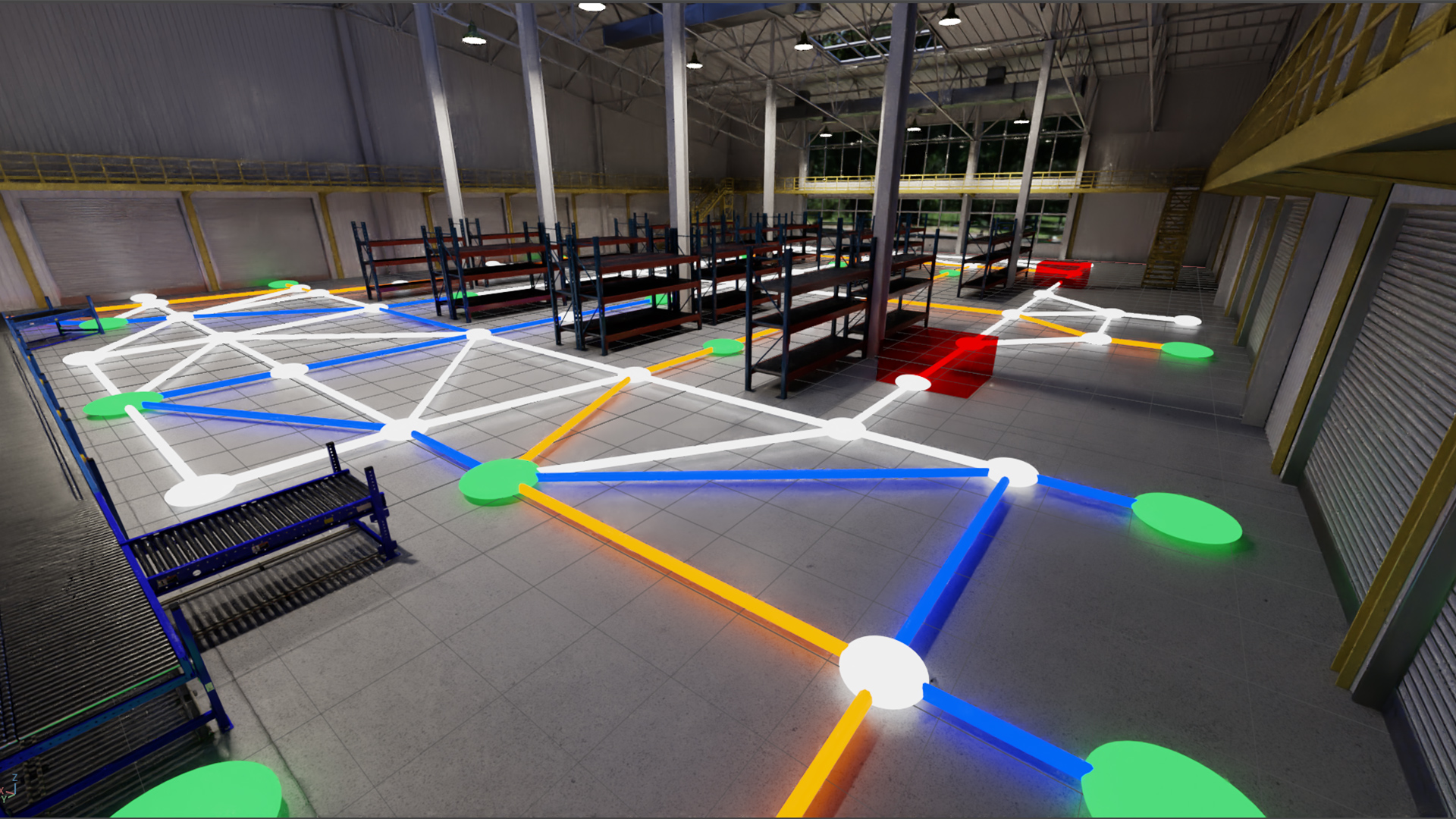
Optimizing Robot Route Planning with NVIDIA cuOpt for Isaac Sim
Recomendado para você
-
Trilinear Ou Bilinear? Fórum Adrenaline - Um dos maiores e mais ativos fóruns do Brasil10 abril 2025
-
 Anisotropic Filtering10 abril 2025
Anisotropic Filtering10 abril 2025 -
 bilinear,trilinear and anisotropic filter10 abril 2025
bilinear,trilinear and anisotropic filter10 abril 2025 -
 News - Gaming Graphical Effects Explained discussion page 510 abril 2025
News - Gaming Graphical Effects Explained discussion page 510 abril 2025 -
 What is Anisotropic filtering10 abril 2025
What is Anisotropic filtering10 abril 2025 -
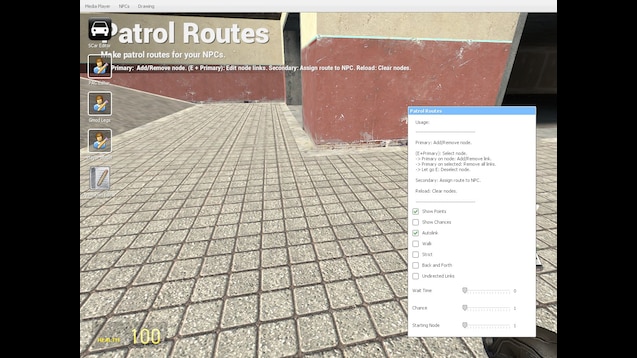
Steam Workshop::Patrol Routes STool10 abril 2025
-
 Ultra realistic Floor Tiles 3D Model Collection10 abril 2025
Ultra realistic Floor Tiles 3D Model Collection10 abril 2025 -
 Texture options - ZDoom Wiki10 abril 2025
Texture options - ZDoom Wiki10 abril 2025 -
Steam Workshop::Context Menu Model Manipulator10 abril 2025
-
 Alexander Alekhin - Procedural Wet Shader10 abril 2025
Alexander Alekhin - Procedural Wet Shader10 abril 2025

você pode gostar
-
 Happy 6th Anniversary Pokemon XYZ!!! by CherryR95 on DeviantArt10 abril 2025
Happy 6th Anniversary Pokemon XYZ!!! by CherryR95 on DeviantArt10 abril 2025 -
 Helicoptero Black Hawk UH60 de controle remoto escala 1:47 escala do falcão UH60-Black 610 abril 2025
Helicoptero Black Hawk UH60 de controle remoto escala 1:47 escala do falcão UH60-Black 610 abril 2025 -
Dct-History10 abril 2025
-
 Drunk Woman Jokes10 abril 2025
Drunk Woman Jokes10 abril 2025 -
 Figuarts Zero One Piece Film Z Zetto Pvc Figure Bandai Tamashii Nation10 abril 2025
Figuarts Zero One Piece Film Z Zetto Pvc Figure Bandai Tamashii Nation10 abril 2025 -
 BOLETIN DO EXÉRCITO 27-21 JULHO 2021 by Roberto Caiafa - Issuu10 abril 2025
BOLETIN DO EXÉRCITO 27-21 JULHO 2021 by Roberto Caiafa - Issuu10 abril 2025 -
 Como ser INVENCIBLE y PODER VOLAR en ROBLOX !!! [CAZANDO MITOS10 abril 2025
Como ser INVENCIBLE y PODER VOLAR en ROBLOX !!! [CAZANDO MITOS10 abril 2025 -
Xbox Game Pass Core 12 Month10 abril 2025
-
 Operation Entebbe: The Dangerous Play10 abril 2025
Operation Entebbe: The Dangerous Play10 abril 2025 -
Takarazuka Wiki10 abril 2025

